
 Guts! Sorry this is a little late. I was accosted by a turkey and green bean casserole which insisted I eat them and then lie on the couch moaning. And then some other excuses occurred which I’m sure you don’t want to hear me make up. Allons-y!
Guts! Sorry this is a little late. I was accosted by a turkey and green bean casserole which insisted I eat them and then lie on the couch moaning. And then some other excuses occurred which I’m sure you don’t want to hear me make up. Allons-y!
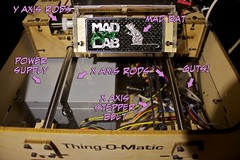
As mentioned last time, it’s time to peer into dear Maddy’s guts (Donna insisted that MadArtBot needed a nickname and that “Maddy” seemed right). Her guts full of wires and circuits and stepper motors. What makes this thing tick… well, whir and whine, actually.
As you saw during the earlier installments, there are 3 axes of movement (X, Y and Z) and each of those is animated by way of a stepper motor. The X and Y axis use belts to move them back/forth and left/right, while the Z axis uses a worm geared rod to raise and lower the extruder. Let’s take a closer look and also talk about how this happens.
Software
Steve D is going to go into this a bit more next time, but it all starts with a USB connection to a computer running ReplicatorG.

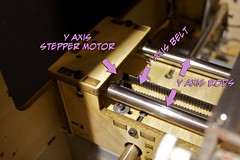
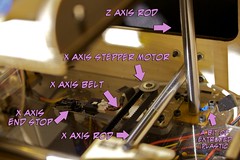
X and Y axes
This is the backwards/forwards, left/right part of the machine. The extruder itself only moves up and down. The X and Y axes move the build platform under it. Here’s a look with some arrows pointing out the good bits.
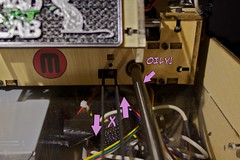
Z axis
Moving the extruder up and down, the Z axis uses a worm gear drive. This is a more economical method because the worm gear handles all that nasty gravity. Otherwise, using a belt, the stepper would have to be much more powerful.


Guts!
To drive all this requires a mixture of specially-made electronics and ‘open hardware’ microcontrollers. Some of you may have heard of a microcontroller called Arduino. Well, our sweet little 3-D printer uses one of these to both communicate with your computer and then pass that on to the control boards which run the various stepper motors for each axis and the extruder. Here’s a blurry look at the electronics before they were put into the Makerbot:

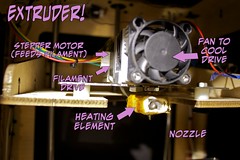
So, in a nutshell, ReplicatorG (and a program called Skeinforge) figure out what X, Y, Z moves are needed and what amount of plastic extrusion during those moves will result in the 3-D object you’ve loaded. This is turned into simple code which is fed to the Arduino controller and, from there, each stepper motor controller and the hot end are told how to move one step at a time. As each move is made and as the extruder metes out plastic, the object is built layer by layer.
OK… you’ll end up with some of this.

But eventually, you’ll end up with things like this:

It’s a bit much to cover in a single post, but I hope the pics help. If you have any questions, please leave a comment and I’ll do my best to answer. And next time around, Steve will do some computerin’ and tell you how to make purty pictures come alive in meat space. After that… we’ll make some stuff!
“OK… you’ll end up with some of this.”
What in the world IS that a picture of? It looks like a photo of a discard pile overlaid with a CAD wireframe.
That’s not far off. The ‘bot builds up objects by laying down lines of molten plastic about 0.3mm in width. For a single layer, it draws the outline, then fills in with crosshatching. Kinda like a pen plotter but with a bit of thickness to it. Ideally, it does this over and over for each layer, one on top of the other until it makes the complete object. Sometimes things go wrong, though and it tries to draw a layer in the wrong place (say, half an inch to the right or something) and ends up laying down plastic in mid-air and you end up with tangles of plastic thread all over the place.
What Steve said. hehe
Also, there are times you just need to run the extruder (changing reels, got a bit of a clog, warming up) and you end up with a long, fine thread of plastic. It’s quite pretty some times. The more solid bits you see that look like a raft are called… rafts. 🙂 They’re not generally used, but if you need to build an object on top of a solid ‘raft-like’ base, you turn on the raft option and this is what the result is (plus the object on top of it). Those are rafts that were removed from an object or where the build was aborted. There’s also a cut off piece of green filament in there.